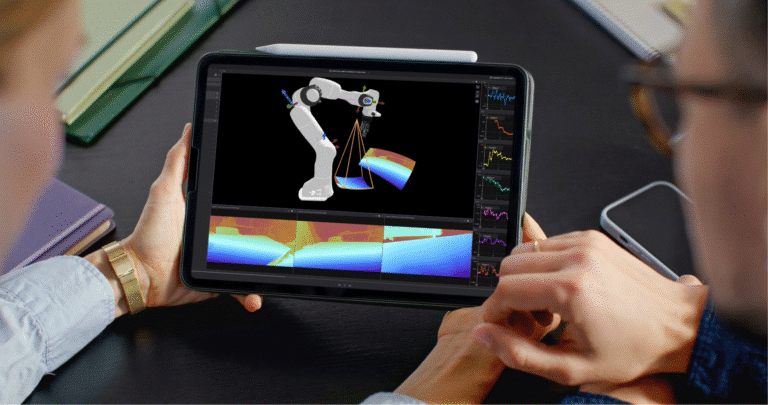
Real-Time Visualization with Foxglove and RT-Kernel
Foxglove integration for RT-Kernel is more than just a software add-on; it’s a bridge between two worlds. It brings the observability and agility of modern robotics development into embedded real-time systems.