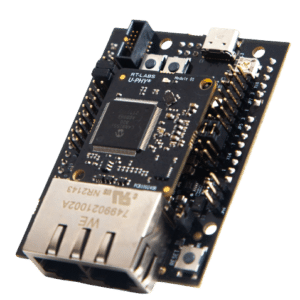
Our communication stacks are especially well suited for embedded systems with small resources. They are designed to work seamlessly together.
RT-Labs provides a variety of plans and products to help you get the assisted technical support you need.